Development of a low-cost PID tuning kit for engineering education
Keywords:
PID controller, PID tuning kit, Ziegler-Nichols method, Tyreus-Luyben methodAbstract
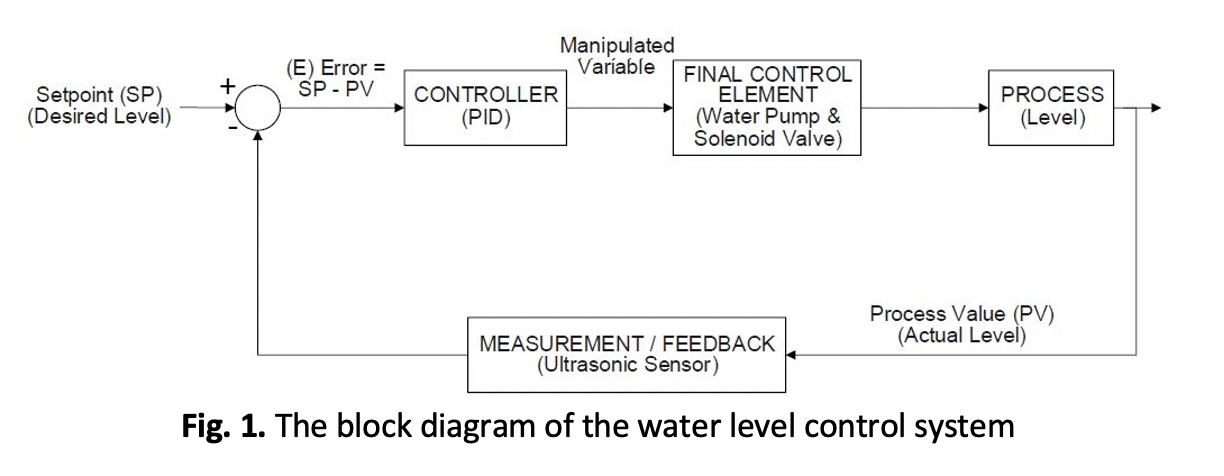
PID controller is used in roughly 90% of process control plants in the industry to deliver better performance to process plants. The PID controller tuning requires adequate knowledge and a deep understanding of the controller. Nevertheless, tuning a PID controller is difficult; if it is poorly tuned, the process plant will face diminishment in terms of performance. To overcome this problem, educational institutions ought to train and offer enough knowledge and understanding of PID tuning to meet industry requirements. However, most institutes can only provide minimal expertise due to a lack of facilities for experimenting with PID controller tuning. This is because the PID trainer kit in the current market is very pricey. Therefore, this study aims to develop a low-cost PID trainer kit for students. The main objective of this project is to make improvements to the design and system of the PID tuning kit that already exists. This PID tuning kit system is developed using Arduino Mega 2560 and LabVIEW. In this project, Arduino acts as a microcontroller for the PID control system, and LabVIEW is used as a data logger to display the output response. Three knobs of potentiometer are utilized to manipulate the parameter of gain in the PID controller. The result from this project is the output response for the P, I and D controller and its combination. The gain value input from the controller influences the output response. The output response is proportional to the error and gain value for the P controller. For the I controller, the output response is proportional to the integral magnitude and error to time. For the D controller, the output response is proportional to error rate changes over time. To conclude, this PID trainer kit can simulate the tuning process of an actual PID controller in the industry.
Downloads