An Enhanced Ants Colony Optimization Algorithm for Path Planning of Autonomous Robots in Continuous Environment
DOI:
https://doi.org/10.37934/ard.133.1.8091Keywords:
Mobile robot, path planning, genetic algorithm, ant colony optimization algorithmAbstract
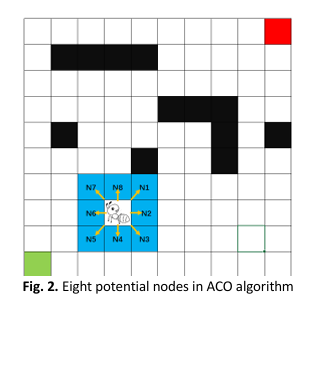
This paper presents a method for mobile robot path planning in complex environments. First, an advanced Ant Colony Optimization (ACO) algorithm is introduced to find viable paths in a discrete grid environment, connecting the starting point to the destination. The proposed ACO algorithm incorporates a probabilistic prediction mechanism to enhance the efficiency of node selection. By integrating ACO's inherent heuristic factors, this approach offers directional intelligence and significantly increases the likelihood of the ant colony finding feasible initial paths. In the improved ACO algorithm, both the pheromone and heuristic factors are integrated into the new probabilistic prediction mechanism, which further improves path planning efficiency. The effectiveness of the proposed algorithm was evaluated using three different planar environment models of varying sizes and complexities. The results show that the algorithm's performance is minimally influenced by its control parameters. Additionally, a comparative analysis was conducted to evaluate the proposed algorithm against A* and traditional ACO. The comparison results indicate that the proposed algorithm outperforms the others in terms of path length, runtime, and success rate.
Downloads
Downloads
Published
How to Cite
Issue
Section