Design of an Internet of Things Based Electromagnetic Robotic Arm for Pick and Place Applications
DOI:
https://doi.org/10.37934/mjcsm.2.1.1220Keywords:
Internet of Things, Electromagnetic Robotic Arm, PWM, Pick and PlaceAbstract
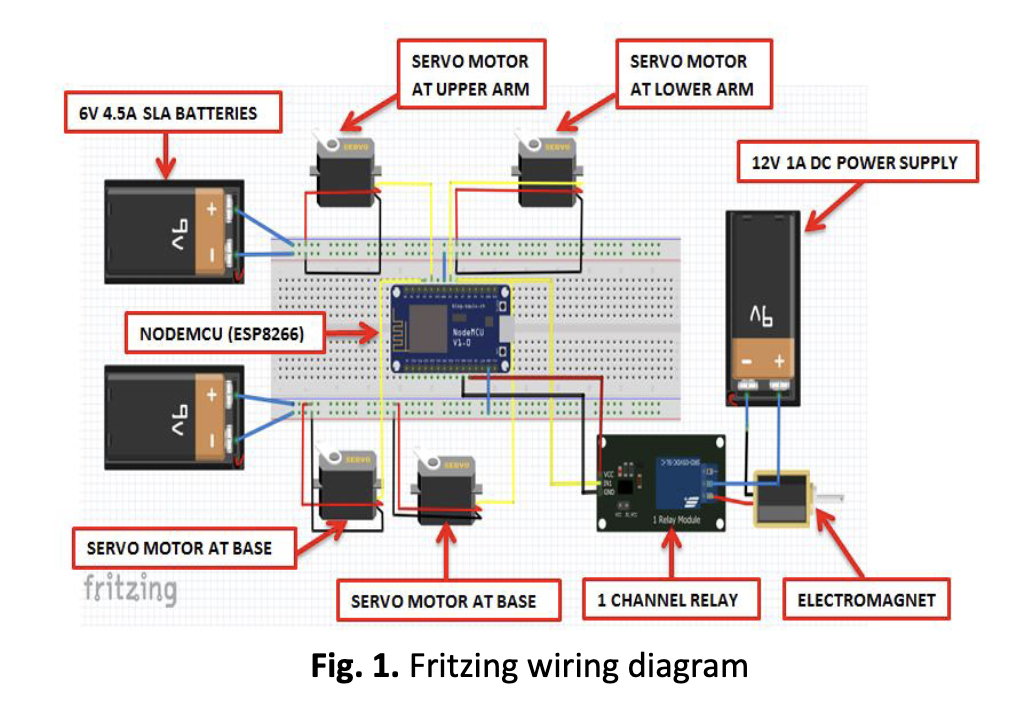
In this generation, industrial robotic arm has been widely used in fields separated from the human society. It is limited because it is not possible to manipulate and interact with people. To depict robotics technology with human-machine interaction and wireless communication, interactivity is possible in real time with virtual objects that makes some other technology needs to be developed which maximizes robot use to assist people with their work in an efficient way. The main objective of this project is to develop and design an interface of Internet of Things controller for robotic arm. The main purpose of making this interface is to remotely control the robotic arm using internet facilities. The robotic arm has four servo motor where all servo motor are assigned with single pulse width modulation which can be control separately. Furthermore, the NodeMCU board was used to receive signal from the Blynk app that authorizes monitoring and controlling the movement of the robotic arm to perform pick and place operations. Meanwhile, the results of this study are verified through manual test implementation. Two type of manual test were done for this project that is pick and place application and time delay to send the data. The pick and place operation of the robotic arm was observed to see whether the robotic arm capable to conduct the instruction precisely to move within their desired angular displacement degree. The time delay to send the data shows that the respond at each of the servo motor to move 180 degrees with no load was influenced by the Wi-Fi signal strength at particular places. Hence, this prototype of the robotic arm showed that the operational to control the robotic arm to perform pick and place application using internet facilities was successful.
Downloads
Downloads
Published
How to Cite
Issue
Section